
来源: https://www.ugsnx.com/thread-328218-1-3.html
主要目的是介绍step这个运动函数的使用,实现更自由控制时间和运动,以及很多人遇到下面这个错误,根据这个帖子来就没有问题了。
运动效果
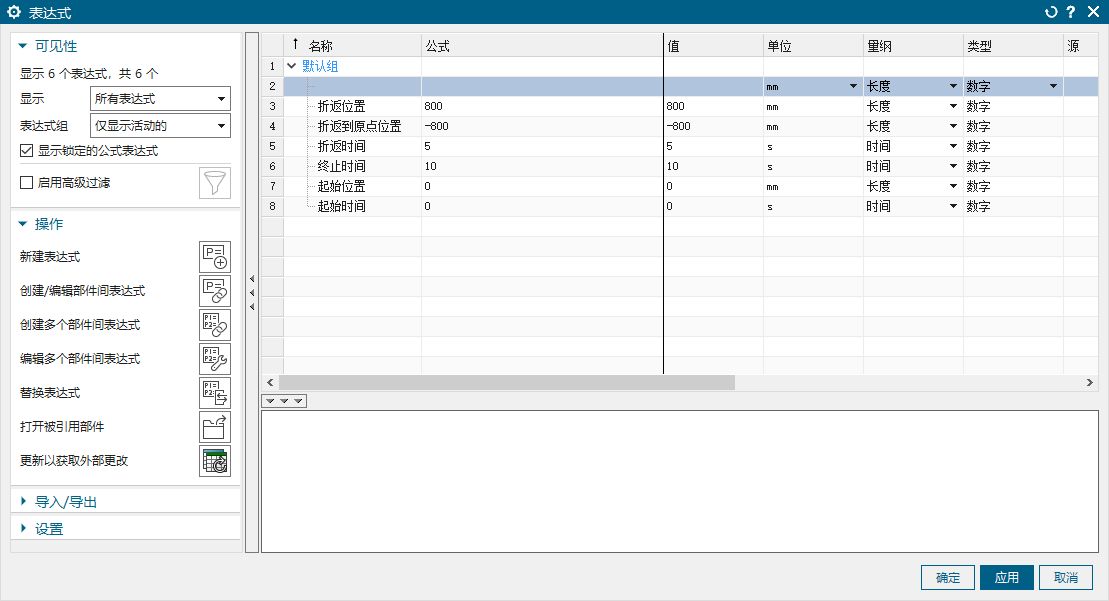
仿真环境里创建下图这些表达式,注意图中单位和量纲,主要去切换量纲,单位就自动出来了,仿真找不到表达式的用命令搜索表达式调出来
模型的装配还有运动体运动副创建就略过了
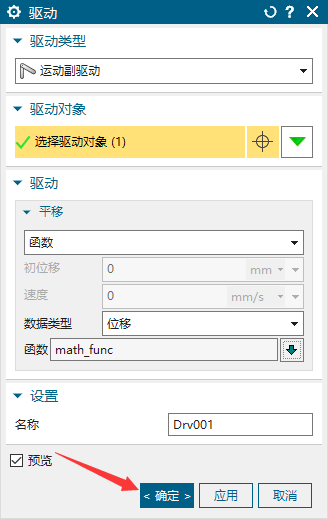
给运动副创建驱动,我这边是滑动副

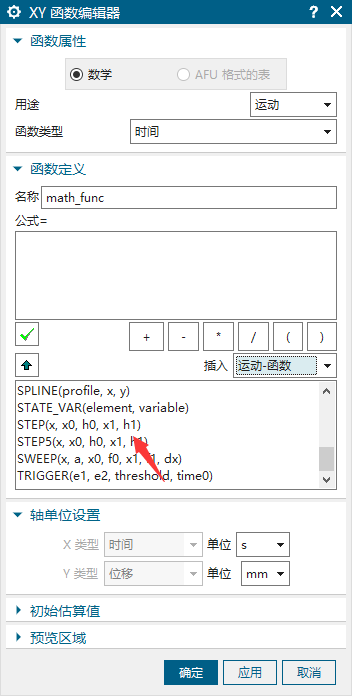
新建函数
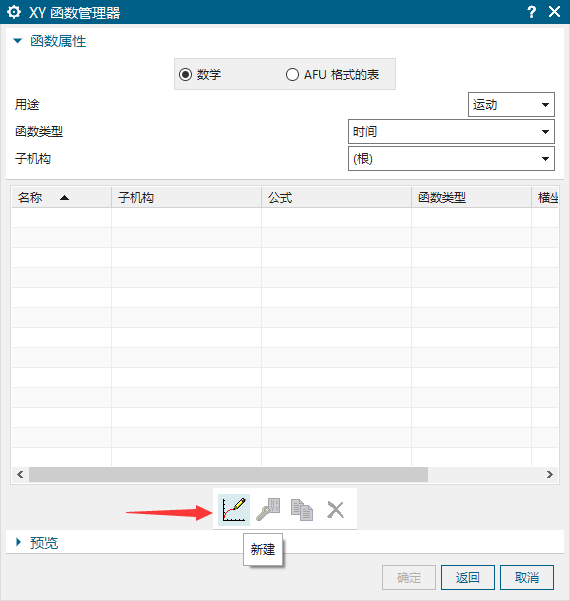
到运动函数里找到step这个函数 双击就加到公式里了
添加两个,两个中间加一个“+”号
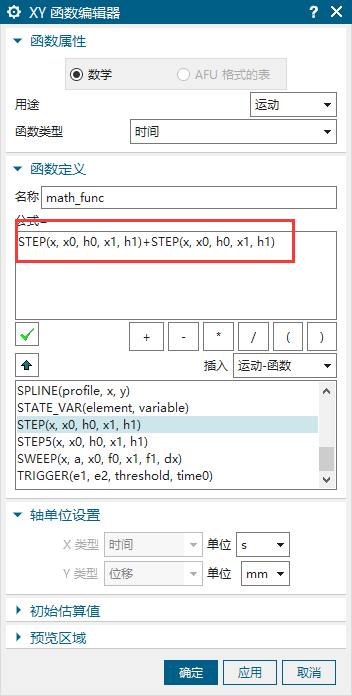
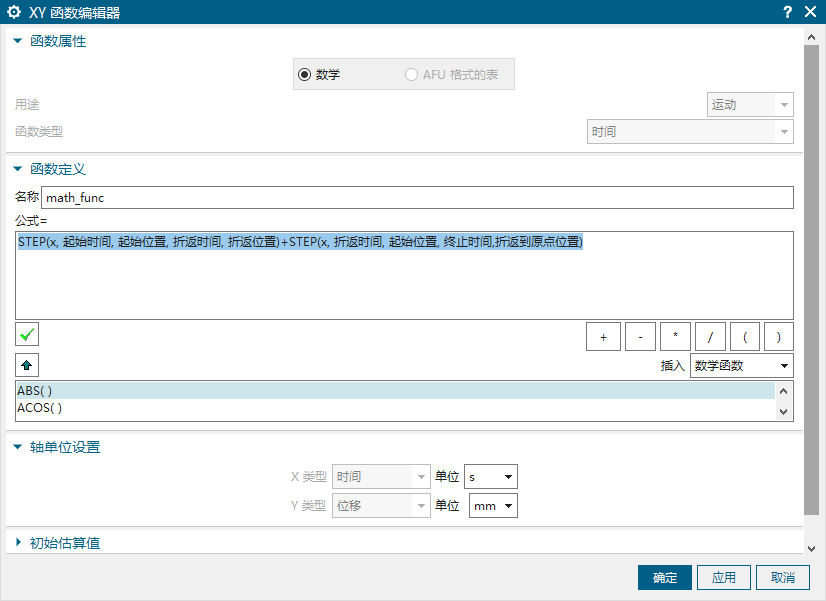
然后修改,这些中文的都是上面的表达式里创建的,我来解释这段的意思
左右两个step函数
左边的:x不用管就默认的,“起始时间:0”位移在“起始位置:0”->到了“折返时间:5”的时候位移运动到“折返位置:800”的位置,那么我们想要他折返怎么办,我们就加一段时间5秒到10秒的函数,也就是右边的step函数。
右边的:他的时间其实也是从0开始走的,我们让这一段的0秒-5秒的时候不要运动,所以就是“折返时间:5”的时候位移还是在“起始位置:0”,到“终止时间:10”的时候位移运动到“折返到原点位置:-800”,因为左边的step函数第5秒的时候已经让位置在800处了,要回来就需要-800。这两个函数是相加的关系。
确定
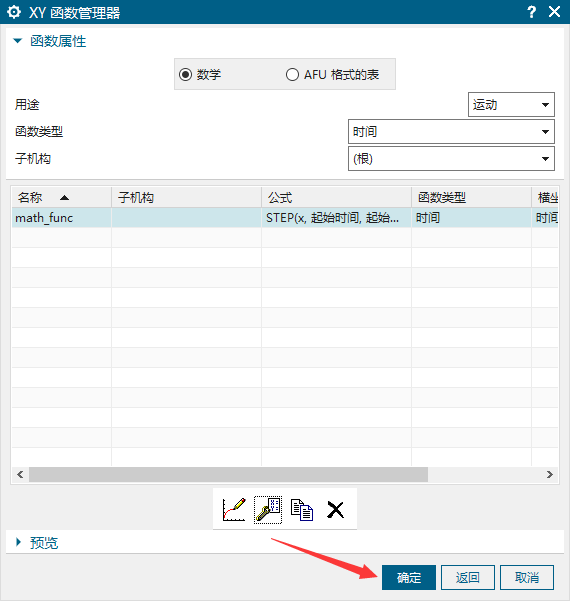
确定
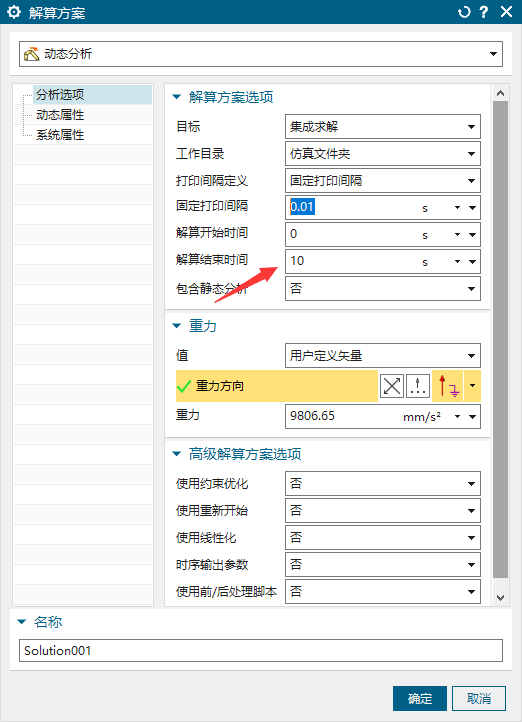
修改解算时间,改成10秒,解算就出结果了
全部回帖 还未有人评论,快来评论抢沙发吧!
本周热门
相关帖子